SOFTWARE
1. Sensores
Para asegurar que el robot sigue una determinada trayectoria y alcanza la posición final deseada en el instante preciso, deben conocerse la posición, la velocidad y la aceleración de los elementos que lo constituyen. Los sensores que proporcionan esta información y, en general, todos aquéllos que producen información sobre el estado interno del robot, se denominan sensores internos.
Por otra parte, en la mayoría de las tareas es necesario conocer datos del mundo que rodea al robot: distancias a objetos (o contacto con ellos), fuerza ejercida en las operaciones de prensión o ejercida por objetos externos (peso), etc. Esta información puede obtenerse con dispositivos muy variados, desde los más simples (micro-interruptores) a los más complejos (cámaras de TV). Éstos se denominan sensores externos. Sin ellos, cualquier suceso inesperado podría bloquear o dañar al robot. Asimismo, la imprecisión que afecta a las magnitudes que intervienen en cualquier tarea (por ejemplo, el posicionado de piezas) malograría todo intento de ejecución fiable.

2. Actuadores
Los elementos actuadores son los dispositivos que ejercen fuerzas y momentos sobre las partes de un robot haciendo que éstas se muevan. Transforman en energía mecánica algún otro tipo de energía y, para que sean útiles en Robótica, deben poder ser controlados con rapidez y precisión. Los actuadores que se utilizan actualmente son de tres tipos:
- Hidráulicos, que aprovechan la circulación de fluidos, normalmente aceite especial. Son controlados mediante servoválvulas que regulan el flujo de fluido, el cual provoca un desplazamiento lineal de un cilindro o pistón. Los actuadores hidráulicos son recomendables en los manipuladores que tienen una gran capacidad de carga, y requieren una precisa regulación de velocidad.
- Neumáticos. Su principio de funcionamiento es similar al de los hidráulicos, pero emplean aire, altamente compresible, a diferencia de los aceites especiales. Los actuadores neumáticos resultan muy indicados en el control de movimientos rápidos, pero de precisión limitada.
- Eléctricos. Son los más utilizados actualmente en robots comerciales y experimentales. Se trata, principalmente, de motores de corriente continua (c.c.) y de motores paso a paso. Ambos convierten energía eléctrica en movimiento rotacional. Los motores c.c. controlados por armadura se comportan en sí mismos como un sistema realimentado, lo que los hace especialmente útiles. Los motores paso a paso permiten realizar giros de paso definido, con precisiones de aproximadamente ±1.8º. Tienen un elevado momento a bajas velocidades y no necesitan codificadores de posición (encoders), es decir, dispositivos que informen continuamente de la posición instantánea.
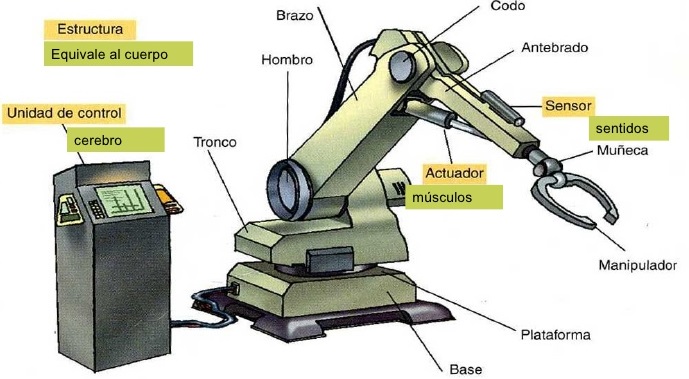
3. Unidad de control
Se trata del "cerebro" del robot, el órgano de tratamiento de la información. Es el responsable de determinar los movimientos precisos de cada parte del mecanismo para que el elemento terminal pueda ser movido a la posición y orientación requeridas en el espacio. Puede tratarse de un PLC (Programmable Logic Controller) en los modelos menos avanzados o de un sistema basado en microprocesadores en los más avanzados. En su memoria contiene un modelo físico del propio robot, un modelo de su entorno y los programas necesarios para desarrollar los algoritmos de control.

4. Otros elementos
Por lo que se refiere a los elementos estructurales y a los elementos terminales del sistema robótico, nos referiremos con detalle a ellos en el tema 5.4, en el caso específico de los robots industriales.
Los dispositivos auxiliares de entrada y salida permiten introducir y, a su vez, ver los datos de la unidad de control. Para enviar instrucciones al controlador y para dar de alta programas de control, habitualmente se utiliza una computadora adicional. Algunos robots únicamente poseen uno de estos componentes: en estos casos, uno de los componentes de entrada y salida permite la realización de todas las funciones. Los más comunes son: teclado, monitor y caja de comandos (teach pendant).
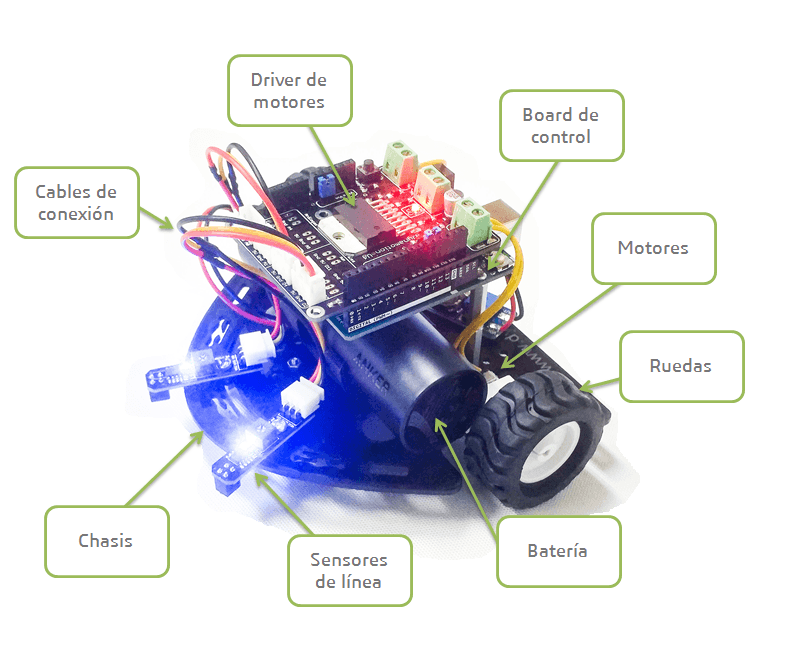
HARDWARE
Arduino es un conjunto de herramientas de software y plataformas de hardware de código abierto, basadas en una placa que incluye circuitos electrónicos con entradas y salidas, analógicas y digitales, que conectan el mundo físico con el mundo virtual para crear desde procesos simples hasta “cosas” inteligentes

No hay comentarios:
Publicar un comentario